Scientists have developed a quadrupedal robot that can use its two front legs to pick up and manipulate objects while walking on its hind legs.
Quadrupedal robots usually take the form of robotic dogs, including Boston Dynamics’ Spot. They can walk over challenging terrain at speed and generally have low centers of gravity. Most object-handling quadrupeds have two extra arms that can carry objects – meaning they have six „limbs” in total.
But the „Logoman” robot is unique because it can switch from all four positions to a standing pose and use its two front legs to manipulate objects. The scientists outlined how the robot works in a study published on March 27 want arXiv Preprint server.
„In this paper, we present a novel approach called LocoMan that improves the manipulation skills of quadruped robots by integrating designed lightweight loco-manipulators, expanding their functional workspace, and enabling precise control over complex 6D manipulation tasks,” the scientists said. Paper.
Locomotion
This design combines the movement of quadrupeds with the function of „manipulators”. The key here is that the locoman’s ability to manipulate objects is developed without compromising agility.
However, its multifunctional legs also demonstrated versatility in challenging environments such as confined spaces and rocky terrain. With the robot displaying precise and stable movements during tasks requiring „complex dual hand coordination”. This differentiates LokoMan from other quadrilateral robots.
Related: Watch a 'robot dog’ battle through a basic parkour course with the help of AI
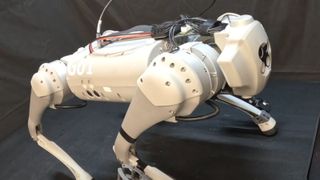
Its design was inspired by the „anatomy of human arms,” the researchers said in their paper, using custom-made loco-manipulators with joints added to the calf area of the front legs.
These leg joints are similar to a human’s elbow and shoulder joints, with the added joints sharing similarities with human wrists. They attached four small actuators (elements that control motion) that provide position, velocity and torque feedback. To make the loco-manipulators more compact, the team designed the gripper as two pairs of rotating jaws with gear engagement, enabling symmetrical opening and closing of the gripper with a single motor.
Picture 1 of 2

To seamlessly integrate the loco-manipulator with the existing architecture of a quadruped robot, the joints must be aligned and allow movement and grasping actions.
Researchers evaluated LocoMan through real-world tests such as opening doors, pushing plugs into electrical sockets, and picking up objects in tight spaces. The team noted in the study that the robot completed all the tasks and showed „remarkable efficiency”.
„Our research provides a different perspective on intelligent robots. Instead of replicating humans in a similar morphology, we want to provide a complementary robot that can do what humans don’t want to do,” he said. Ding Zhao, associate professor of mechanical engineering at Cornell University, in a statement. „Logoman makes it possible for quadrupedal robots to perform complex manipulative tasks in tight spaces.”
Scientists now want to test LokoMan in more challenging real-world settings and situations. They plan to incorporate computer vision and machine learning algorithms into the robot in their future research.

„Oddany rozwiązywacz problemów. Przyjazny hipsterom praktykant bekonu. Miłośnik kawy. Nieuleczalny introwertyk. Student.